Der Roboter UR3 ist ein kleinerer kollaborierender Tischroboter, perfekt für leichte Montageaufgaben und automatisierte Werkbankszenarios.
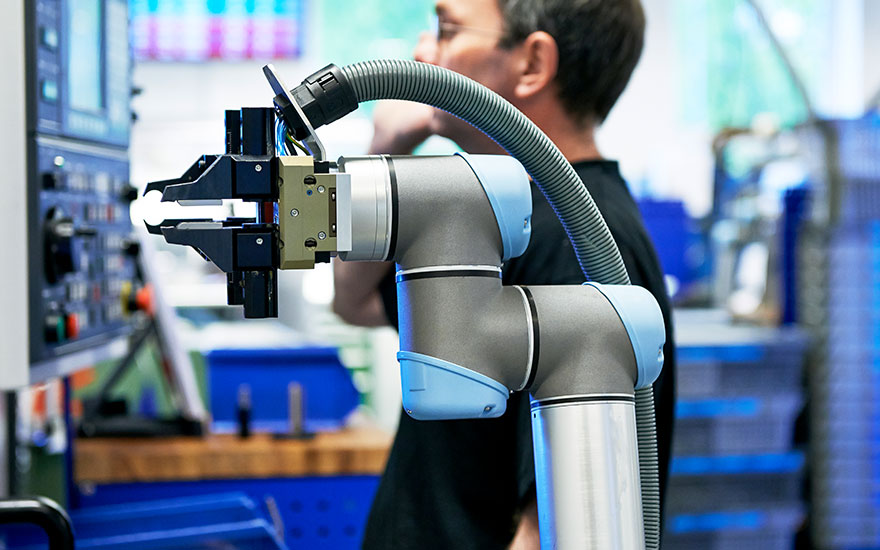
Der kompakte Tischcobot wiegt nur 11 kg, aber hat eine Nutzlast von 3 kg, kann jedes Gelenk um 360° und das Endgelenk ohne Begrenzung drehen. Diese einzigartigen Eigenschaften machen den UR3-Cobot zum flexibelsten und leichtesten kollaborierenden Tischroboter, der Seite an Seite mit Mitarbeitern arbeitet und derzeit auf dem Markt ist.
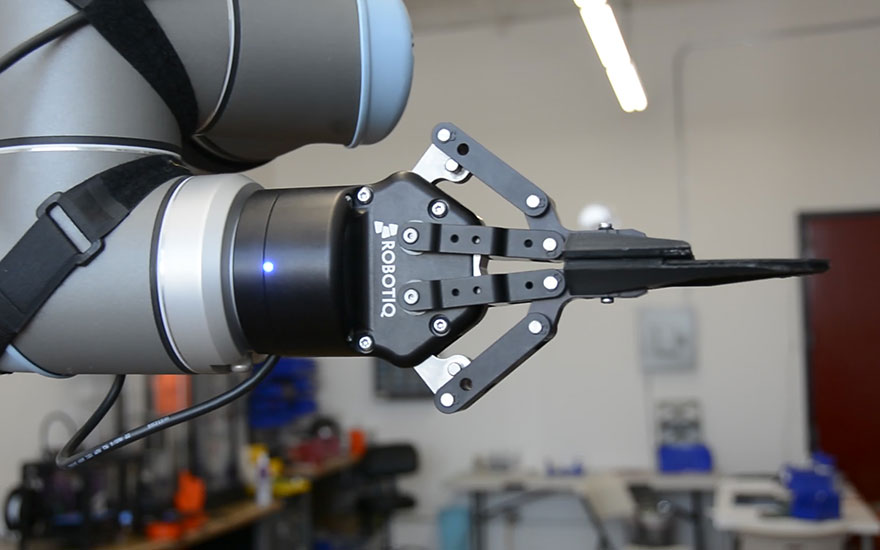
Der kollaborierende Roboter UR3 ist ein optimaler Gehilfe bei Montage-, Polier-, Kleb-, und Schraubanwendungen, die einheitliche Produktqualität erfordern. Der kollaborierende Tischroboter kann auch auf dem Tisch befestigt an einer separaten Arbeitsstation eingesetzt werden, wo er Teile in optimierten Fertigungsabläufen aufnimmt, zusammensetzt und ablegt. Wegen seiner kompakten Form und leichten Programmierung ist es leicht zwischen Aufgaben zu wechseln, um agile Fertigungsbedürfnisse zu erfüllen, was zu niedrigen Gesamtbetriebskosten und einer sehr schnellen Amortisationszeit führt.
UR3-Roboteranwendungen umfassen Fertigungsindustrien von medizinischen Geräten zu Platinen und elektronischen Komponenten
Bei Interesse oder Fragen zum Produkt können Sie gerne die Möglichkeit nutzen, uns unverbindlich zu kontaktieren. Wir beraten Sie ausführlich zu diesem Produkt und geben Ihnen nützliche Hinweise, wie sie es in Ihre Produktion integrieren können.